![]()
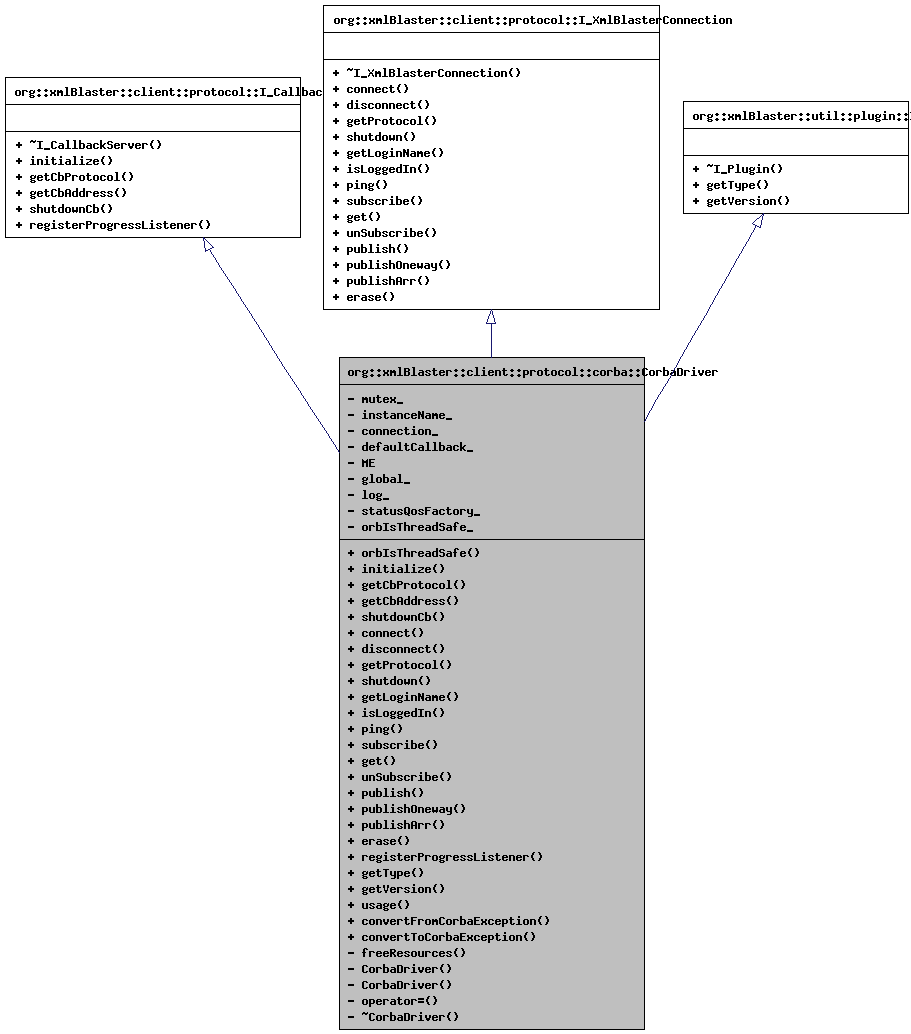

Definition at line 34 of file CorbaDriver.h.
| bool org::xmlBlaster::client::protocol::corba::CorbaDriver::orbIsThreadSafe | ( | ) |
For single threaded CORBA implementations only (like MICO).
One instance (the first) starts a main loop and checks if the orb has some work to perform (every 20 millis). In your real application this should be done by your main loop (e.g. from X-Window) E.g. mico has a helper implementation to register its file descriptors with another main loop.
Definition at line 87 of file CorbaDriver.h.
| void org::xmlBlaster::client::protocol::corba::CorbaDriver::initialize | ( | std::string & | name, | |
| org::xmlBlaster::client::I_Callback & | client | |||
| ) | [virtual] |
Initialize and start the callback server.
This is guaranteed to be invoked after the default constructor.
| glob | The global handle with your environment settings | |
| name | The login name of the client, for logging only | |
| client | Your implementation to receive the callback messages from xmlBlaster |
Implements org::xmlBlaster::client::protocol::I_CallbackServer.
| string org::xmlBlaster::client::protocol::corba::CorbaDriver::getCbProtocol | ( | ) | [virtual] |
Returns the 'well known' protocol type.
Implements org::xmlBlaster::client::protocol::I_CallbackServer.
Definition at line 224 of file CorbaDriver.cpp.
References org::xmlBlaster::util::Constants::IOR.
| string org::xmlBlaster::client::protocol::corba::CorbaDriver::getCbAddress | ( | ) | [virtual] |
Returns the current callback address.
Implements org::xmlBlaster::client::protocol::I_CallbackServer.
Definition at line 229 of file CorbaDriver.cpp.
References _COMM_CATCH, _COMM_TRY, and org::xmlBlaster::client::protocol::corba::CorbaConnection::getCbAddress().
| bool org::xmlBlaster::client::protocol::corba::CorbaDriver::shutdownCb | ( | ) | [virtual] |
Stop the server.
Implements org::xmlBlaster::client::protocol::I_CallbackServer.
Definition at line 236 of file CorbaDriver.cpp.
References _COMM_CATCH, _COMM_TRY, and org::xmlBlaster::client::protocol::corba::CorbaConnection::shutdownCb().
| ConnectReturnQosRef org::xmlBlaster::client::protocol::corba::CorbaDriver::connect | ( | org::xmlBlaster::util::qos::ConnectQosRef & | qos | ) | [virtual] |
connect() is a login or authentication as well, the authentication schema is transported in the qos.
| qos | The authentication and other informations | |
| client | A handle to your callback if desired or null |
Implements org::xmlBlaster::client::protocol::I_XmlBlasterConnection.
Definition at line 243 of file CorbaDriver.cpp.
References _COMM_CATCH, _COMM_TRY, and org::xmlBlaster::client::protocol::corba::CorbaConnection::connect().
| bool org::xmlBlaster::client::protocol::corba::CorbaDriver::disconnect | ( | org::xmlBlaster::util::qos::DisconnectQos & | qos | ) | [virtual] |
Logout from xmlBlaster.
| qos | The QoS or null |
Implements org::xmlBlaster::client::protocol::I_XmlBlasterConnection.
Definition at line 251 of file CorbaDriver.cpp.
References _COMM_CATCH, _COMM_TRY, org::xmlBlaster::client::protocol::corba::CorbaConnection::disconnect(), and org::xmlBlaster::util::qos::DisconnectQos::toXml().
| string org::xmlBlaster::client::protocol::corba::CorbaDriver::getProtocol | ( | ) | [virtual] |
Implements org::xmlBlaster::client::protocol::I_XmlBlasterConnection.
Definition at line 259 of file CorbaDriver.cpp.
References org::xmlBlaster::util::Constants::IOR.
| bool org::xmlBlaster::client::protocol::corba::CorbaDriver::shutdown | ( | ) | [virtual] |
Is called when we disconnect or automatically when are going to POLLING mode.
Implements org::xmlBlaster::client::protocol::I_XmlBlasterConnection.
Definition at line 274 of file CorbaDriver.cpp.
References _COMM_CATCH, _COMM_TRY, and org::xmlBlaster::client::protocol::corba::CorbaConnection::shutdown().
| string org::xmlBlaster::client::protocol::corba::CorbaDriver::getLoginName | ( | ) | [virtual] |
Implements org::xmlBlaster::client::protocol::I_XmlBlasterConnection.
Definition at line 282 of file CorbaDriver.cpp.
References _COMM_CATCH, _COMM_TRY, and org::xmlBlaster::client::protocol::corba::CorbaConnection::getLoginName().
| bool org::xmlBlaster::client::protocol::corba::CorbaDriver::isLoggedIn | ( | ) | [virtual] |
Implements org::xmlBlaster::client::protocol::I_XmlBlasterConnection.
Definition at line 289 of file CorbaDriver.cpp.
References _COMM_CATCH, _COMM_TRY, and org::xmlBlaster::client::protocol::corba::CorbaConnection::isLoggedIn().
| std::string org::xmlBlaster::client::protocol::corba::CorbaDriver::ping | ( | std::string & | qos | ) | [virtual] |
| SubscribeReturnQos org::xmlBlaster::client::protocol::corba::CorbaDriver::subscribe | ( | org::xmlBlaster::client::key::SubscribeKey & | key, | |
| org::xmlBlaster::client::qos::SubscribeQos & | qos | |||
| ) | [virtual] |
Implements org::xmlBlaster::client::protocol::I_XmlBlasterConnection.
Definition at line 304 of file CorbaDriver.cpp.
References _COMM_CATCH, _COMM_TRY, org::xmlBlaster::util::qos::StatusQosFactory::readObject(), org::xmlBlaster::client::protocol::corba::CorbaConnection::subscribe(), org::xmlBlaster::client::qos::UnSubscribeQos::toXml(), and org::xmlBlaster::client::key::UnSubscribeKey::toXml().
| vector< MessageUnit > org::xmlBlaster::client::protocol::corba::CorbaDriver::get | ( | org::xmlBlaster::client::key::GetKey & | key, | |
| org::xmlBlaster::client::qos::GetQos & | qos | |||
| ) | [virtual] |
Implements org::xmlBlaster::client::protocol::I_XmlBlasterConnection.
Definition at line 313 of file CorbaDriver.cpp.
References _COMM_CATCH, _COMM_TRY, org::xmlBlaster::client::protocol::corba::CorbaConnection::get(), org::xmlBlaster::client::qos::UnSubscribeQos::toXml(), and org::xmlBlaster::client::key::UnSubscribeKey::toXml().
| vector< UnSubscribeReturnQos > org::xmlBlaster::client::protocol::corba::CorbaDriver::unSubscribe | ( | org::xmlBlaster::client::key::UnSubscribeKey & | key, | |
| org::xmlBlaster::client::qos::UnSubscribeQos & | qos | |||
| ) | [virtual] |
Implements org::xmlBlaster::client::protocol::I_XmlBlasterConnection.
Definition at line 322 of file CorbaDriver.cpp.
References _COMM_CATCH, _COMM_TRY, org::xmlBlaster::util::qos::StatusQosFactory::readObject(), org::xmlBlaster::client::qos::UnSubscribeQos::toXml(), org::xmlBlaster::client::key::UnSubscribeKey::toXml(), and org::xmlBlaster::client::protocol::corba::CorbaConnection::unSubscribe().
| PublishReturnQos org::xmlBlaster::client::protocol::corba::CorbaDriver::publish | ( | org::xmlBlaster::util::MessageUnit & | msgUnit | ) | [virtual] |
Implements org::xmlBlaster::client::protocol::I_XmlBlasterConnection.
Definition at line 337 of file CorbaDriver.cpp.
References _COMM_CATCH, _COMM_TRY, org::xmlBlaster::util::I_Log::call(), org::xmlBlaster::client::protocol::corba::CorbaConnection::publish(), org::xmlBlaster::util::qos::StatusQosFactory::readObject(), and org::xmlBlaster::util::I_Log::trace().
| void org::xmlBlaster::client::protocol::corba::CorbaDriver::publishOneway | ( | std::vector< org::xmlBlaster::util::MessageUnit > & | msgUnitArr | ) | [virtual] |
| std::vector<org::xmlBlaster::client::qos::PublishReturnQos> org::xmlBlaster::client::protocol::corba::CorbaDriver::publishArr | ( | std::vector< org::xmlBlaster::util::MessageUnit > & | msgUnitArr | ) | [virtual] |
| vector< EraseReturnQos > org::xmlBlaster::client::protocol::corba::CorbaDriver::erase | ( | org::xmlBlaster::client::key::EraseKey & | key, | |
| org::xmlBlaster::client::qos::EraseQos & | qos | |||
| ) | [virtual] |
Implements org::xmlBlaster::client::protocol::I_XmlBlasterConnection.
Definition at line 371 of file CorbaDriver.cpp.
References _COMM_CATCH, _COMM_TRY, org::xmlBlaster::client::protocol::corba::CorbaConnection::erase(), org::xmlBlaster::util::qos::StatusQosFactory::readObject(), org::xmlBlaster::client::qos::UnSubscribeQos::toXml(), and org::xmlBlaster::client::key::UnSubscribeKey::toXml().
| I_ProgressListener * org::xmlBlaster::client::protocol::corba::CorbaDriver::registerProgressListener | ( | org::xmlBlaster::client::protocol::I_ProgressListener * | listener | ) | [virtual] |
Implements org::xmlBlaster::client::protocol::I_CallbackServer.
Definition at line 386 of file CorbaDriver.cpp.
References org::xmlBlaster::util::I_Log::warn().
| std::string org::xmlBlaster::client::protocol::corba::CorbaDriver::usage | ( | ) | [static] |
Definition at line 391 of file CorbaDriver.cpp.
References org::xmlBlaster::client::protocol::corba::CorbaConnection::usage().
Referenced by org::xmlBlaster::util::Global::usage().
| org::xmlBlaster::util::XmlBlasterException org::xmlBlaster::client::protocol::corba::CorbaDriver::convertFromCorbaException | ( | serverIdl::XmlBlasterException & | ex | ) | [static] |
Definition at line 399 of file CorbaDriver.cpp.
References serverIdl::XmlBlasterException::embeddedMessage, serverIdl::XmlBlasterException::errorCodeStr, serverIdl::XmlBlasterException::lang, serverIdl::XmlBlasterException::location, serverIdl::XmlBlasterException::message, serverIdl::XmlBlasterException::node, serverIdl::XmlBlasterException::stackTrace, serverIdl::XmlBlasterException::timestampStr, serverIdl::XmlBlasterException::transactionInfo, and serverIdl::XmlBlasterException::versionInfo.
Referenced by org::xmlBlaster::client::protocol::corba::CorbaConnection::initAuthenticationService().
| serverIdl::XmlBlasterException org::xmlBlaster::client::protocol::corba::CorbaDriver::convertToCorbaException | ( | org::xmlBlaster::util::XmlBlasterException & | ex | ) | [static] |
Definition at line 415 of file CorbaDriver.cpp.
References org::xmlBlaster::util::XmlBlasterException::getEmbeddedMessage(), org::xmlBlaster::util::XmlBlasterException::getErrorCodeStr(), org::xmlBlaster::util::XmlBlasterException::getLang(), org::xmlBlaster::util::XmlBlasterException::getLocation(), org::xmlBlaster::util::XmlBlasterException::getMessage(), org::xmlBlaster::util::XmlBlasterException::getNode(), org::xmlBlaster::util::XmlBlasterException::getStackTraceStr(), org::xmlBlaster::util::XmlBlasterException::getTimestamp(), org::xmlBlaster::util::XmlBlasterException::getTransactionInfo(), and org::xmlBlaster::util::XmlBlasterException::getVersionInfo().
| std::string org::xmlBlaster::client::protocol::corba::CorbaDriver::getType | ( | ) | [virtual] |
Get the name of the plugin.
Implements org::xmlBlaster::util::plugin::I_Plugin.
Definition at line 141 of file CorbaDriver.h.
References org::xmlBlaster::util::Constants::IOR.
| std::string org::xmlBlaster::client::protocol::corba::CorbaDriver::getVersion | ( | ) | [virtual] |
Get the version of the plugin.
Implements org::xmlBlaster::util::plugin::I_Plugin.
Definition at line 148 of file CorbaDriver.h.
friend class CorbaDriverFactory [friend] |
Definition at line 39 of file CorbaDriver.h.